Aperiodic signals:
If the signal does not repeat at regular intervals of time is called aperiodic signal.
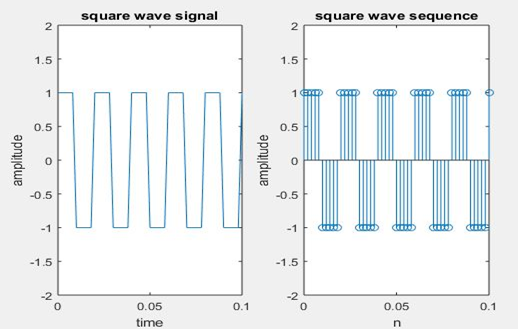
Square wave:
Let us consider an example for square wave in matlab.
clc;
clear all;
close all;
t=0:0.002:0.1;
y=square(2*pi*50*t);
figure;
subplot(1,2,1);
plot(t,y);
axis([0 0.1 -2 2]);
xlabel(‘time’);
ylabel(‘amplitude’);
title(‘square wave signal’);
%generation of square wave sequence
subplot(1,2,2);
stem(t,y);
axis([0 0.1 -2 2]);
xlabel(‘n’);
ylabel(‘amplitude’);
title(‘square wave sequence’);
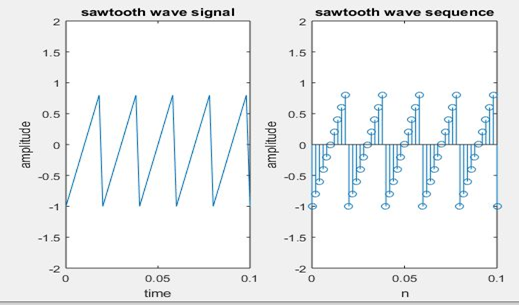
Sawtooth wave:
Let us consider an example of sawtooth wave in matlab.
clc;
clear all;
close all;
%generation of sawtooth signal
t=0:0.002:0.1;
y=sawtooth(2*pi*50*t);
subplot(1,2,1);
plot(t,y);
axis([0 0.1 -2 2]);
xlabel(‘time’);
ylabel(‘amplitude’);
title(‘sawtooth wave signal’);
%generation of sawtooth sequence
subplot(1,2,2);
stem(t,y);
axis([0 0.1 -2 2]);
xlabel(‘n’);
ylabel(‘amplitude’);
title(‘sawtooth wave sequence’);
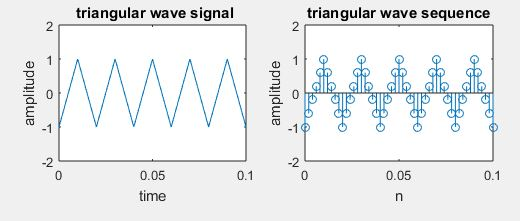
Triangular wave:
Let us consider an example of triangular wave in matlab.
clc;
clear all;
close all;
%generation of triangular wave signal
t=0:0.002:0.1;
y=sawtooth(2*pi*50*t,.5);
figure;
subplot(2,2,1);
plot(t,y);
axis([0 0.1 -2 2]);
xlabel(‘time’);
ylabel(‘amplitude’);
title(‘ triangular wave signal’);
%generation of triangular wave sequence
subplot(2,2,2);
stem(t,y);
axis([0 0.1 -2 2]);
xlabel(‘n’);
ylabel(‘amplitude’);
title(‘triangular wave sequence’);