Types Of Transmission Media:
Transmission media is physical path which carry information from one device to another device.some of the examples of transmission media are Guided and Unguided media, transmission will always not in physical form but also it may invisible form. Transmission is categorised as follows:
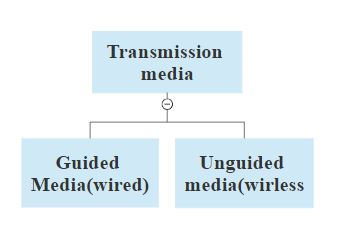
Fig: Types Of Transmission Media
Guided media:
Guided means there will be a physical connection between transmitter and receiver.some examples of guided media are twisted pair, coaxial-cable and fibre optics.
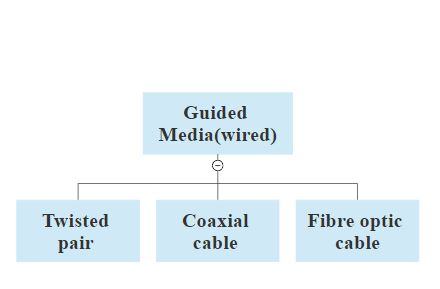
Fig : Guided media types
Twisted pair:
Twisted pair cables are mostly used for transmission of both voice and data signals, twisted pair wire are mainly categorised into two types. Shielded and unshielded twisted pair.
Fig : Twisted pair types
Unshielded twisted pair: (UTP)
UTP wires are mainly used in telephone systems which will carry both the voice and data signals.Unshielded twisted pair cable consist of two copper conductors, the wires will be kept parallel with this it will reduce noise. Noise will reduced due to twist in the wire. The copper conductor is covered with insulators.some advantages of UTP are it is cheap,easy to install,flexible to use.
Shielded twisted pair: (STP)
The crosstalk which presented in UTP is eliminated in STP because STP wire has a metal shield covering that encase each pair of insulated conductor.
Applications of twisted pair:
- It is used for Data communication.
- It can handle a data speed of 100 Mbps.
- Useful for telephone networks.
Coaxial cable:
When compared with the both UTP and STP is more expensive and it is more complicated to install in a building because of more number of twists and turns. Coaxial cables are categorised according to radio government rating(RG). RG will provide some set of specifcations based on wire guage of inner conductor, thickness and type of the inner conductor.
| category | impedance | Use |
| RG-58 | 50 Ohms | Thin ethernet |
| RG-59 | 75 Ohms | Cable TV |
| RG-11 | 50 Ohms | Thick ethernet |
Applications:
Used for both data and voice commnication.
Used in cable TV.
Fibre optics:
Fibre optical is combination of both glass and plastic which is useful for tranmission of information in the form of light eg: video,voice and data. protecting cover in fibre opic is made of fibre plastic or glass, core and cladding is made of plastic or glass. It works on the principle of “Total internal reflection”.when the light ray reflects back in the same medium is known as Total internal reflection.
Some advantages of fibre optic wires are;
- It is more secure when compared with others.
- Less expensive when compared with coaxial cable
- It is small in size.
- More flexible and strong.
- Light in weight.
- High information capacity.
Applications:
- Used in Telecommunication.
- Provide secure communication for the military.
- Local and long-distance telephone communication.
- Aircraft communication.
- CCTV systems.
- Ethernet and Gigabit ethernet.