FAST ETHERNET:
In order to compete with LAN protocols fast ethernet was designed.it can transmit data 10 times faster when compared with standard ethernet. It has 100mbps data rate, which has same minimum and maximum frame length when compared with standard ethernet. A new feature which added to fast ethernet is auto negotiation, which was designed particularly for the following uses.
It allows a device of 10 mbps is connected to a device of 100mbps capacity.
It allow one device to have multiple capabilities.
It also allowed to check the hub’s capabilities.
Fast ethernet was implemented at physical layer which is categorized has follows two-wire or four-wire. In two-wire implementation further categorized into 5 UTP (100Base-TX) or fiber-optic cable (100Base-Fx). And four-wire is implemented for 3 UTP (100 BaseT4).
The encoding scheme used for fast ethernet:
Manchester encoding scheme required 200-M baud bandwidth for the data rate of 100Mbps, which seems unsuitable for medium such as twisted-pair. For this reason, the fast ethernet was designed with an alternative encoding/decoding scheme.
100Base-TX:
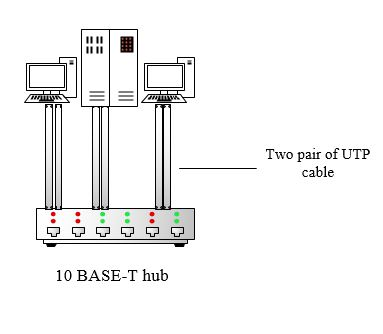
It uses two pair of twisted-pair cable i.e., 5 UTP or STP. In order to obtain good performance and bandwidth MLT-3 scheme was implemented. Where MLT-3 scheme is not a self-synchronous line-coding scheme, for this we are providing 4B/5B block coding to provide bit synchronization by preventing the occurrence of a long sequence of 0s and 1s. Which will improves the data rate of 125 Mbps.
100Base-FX:
It uses two pair of twisted-pair of fiber-optic cables. This will handle high bandwidth requirement by using simple encoding schemes. In order to provide the above requirement designer provided NRZ-I encoding scheme which has a bit synchronization problem for long sequence of 0s.to over the above problem designer used 4B/5B encoding scheme which can improves the data rates from 100 to 125 mbps, which can be easily handled by fiber-optics.
100Base-T4: It was designed by using 3 or higher UTP. This implementation will be done by using four-pair of UTP for transmitting 100mbps. In this encoding/decoding schemes are more complicated, for this reason, the designer used three pairs of UTP category 3, however, can handle only 75 M baud each. In order to convert 100 Mbps to 75 M baud designer used 8B/6T to satisfies the above requirement.