Z TRANSFORM
For discrete time linear time-invariant system with impulse response h[n], the response y[n] of the system to a complex exponential input of the form z-1 is
Y[n] =H[z].zn
Where H[z] = zn ——-2
For z=ejw with real (i.e., with |z| =1), the sum in above equation corresponds to the discrete-time Fourier transform of h[n].
Generally, when |z| is not restricted to unity, then summation in equation 2 is referred as z transform of h[n].
Z transform for the discrete time signal x[n] is determined as
X[z] = zn
Where, z= a complex variable.
Program:
clc;
clear all;
close all;
%enter the numerator and denominators coefficients in square brackets
num=input(‘enter numerator co-efficients’);
den=input(‘enter denominator co-efficients’);
% find poles and zeros
poles=roots(den)
zeros=roots(num)
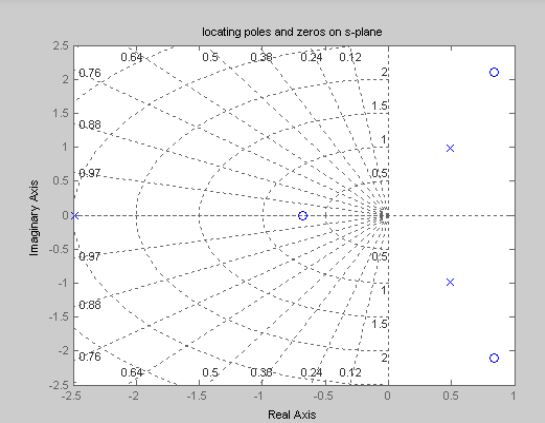
% find transfer function H(s)
h=tf(num,den);
% plot the pole-zero map in s-plane
sgrid;
pzmap(h);
grid on;
title(‘locating poles and zeros on s-plane’);
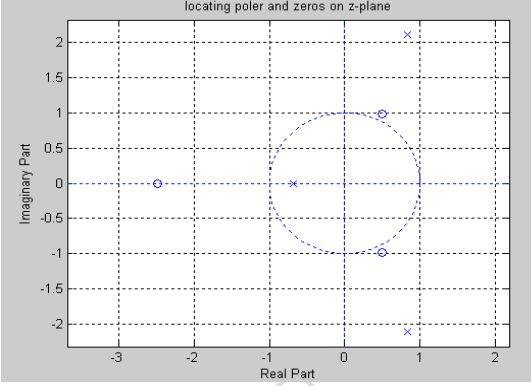
%plot the pole zero map in z-plane
figure
zplane(poles,zeros);
grid on;
title(‘locating poles and zeros on z-plane’);
Output:
Enter numerator co-efficients [2 -12 4 5]
Enter denominator co-efficients [3 4 5 6]
Poles =
-1.2653 + 0.0000i
-0.0340 + 1.2568i
-0.0340 – 1.2568i
Zeros =
5.5594
0.9262
-0.4855
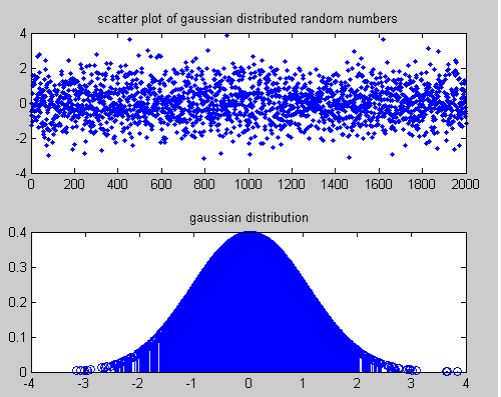
- GAUSSIAN NOISE:
Gaussian noise will be defined as statistical noise which features a probability density function of the traditional distribution (also referred to as Gaussian distribution). In other words, the valuestha the noise can combat are Gaussian-distributed. It is most ordinarily used as additive noise to yield additive white Gaussian noise (AWGN). Gaussian noise is correctly defined because of the noise with a Gaussian amplitude distribution.
Program:
clc;
clear all;
close all;
%let’s generates the given set of 2000 samples for Gaussian distributed random numbers
x=randn(1,2000);
%to plot the joint distribution for both the sets using dot.
subplot(211)
plot(x,’.’);
title(‘scatter plot of gaussian distributed random numbers’);
ymu=mean(x);
ymsq=sum(x.^2)/length(x);
ysigma=std(x);
yvar=var(x);
yskew=skewness(x);
p=normpdf(x,ymu,ysigma);
subplot(212);
stem(x,p);
title(‘ gaussian distribution’);